Games202-Lecture4 Real-Time-Shadow 2
本文最后更新于:6 个月前
PCF的数学原理
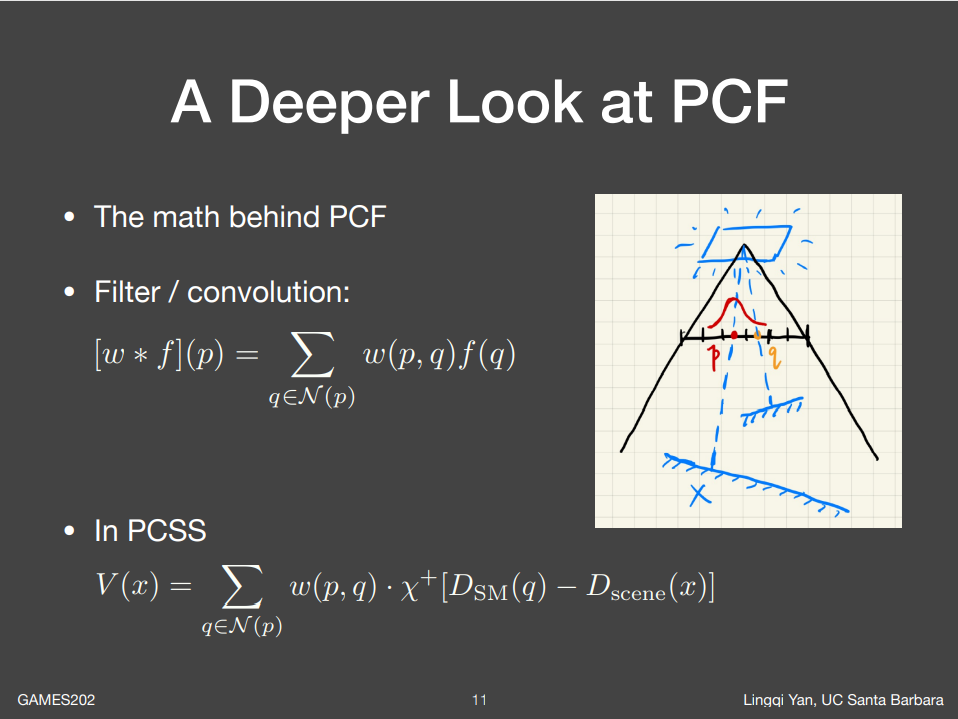
x为shading point,投影到shadow map上为点p,q为包含p的范围N内的一点
对于PCF的filter/convolution卷积:
w函数为根据距离等因素设置的加权,对于范围N内的每一个点q,函数值都要加权平均再相加,最后得到p点的值。
对于PCSS的卷积:
函数的输出为点x的visibility。X函数为符号函数,变量大于零,函数值为1,否则为零。函数内部为点q与点x的深度值之差。若点q挡住了x,则X函数值为0。挡不到的话,X函数值为1。最后对N区域内无遮挡的点进行加权平均,最后得到visibility。
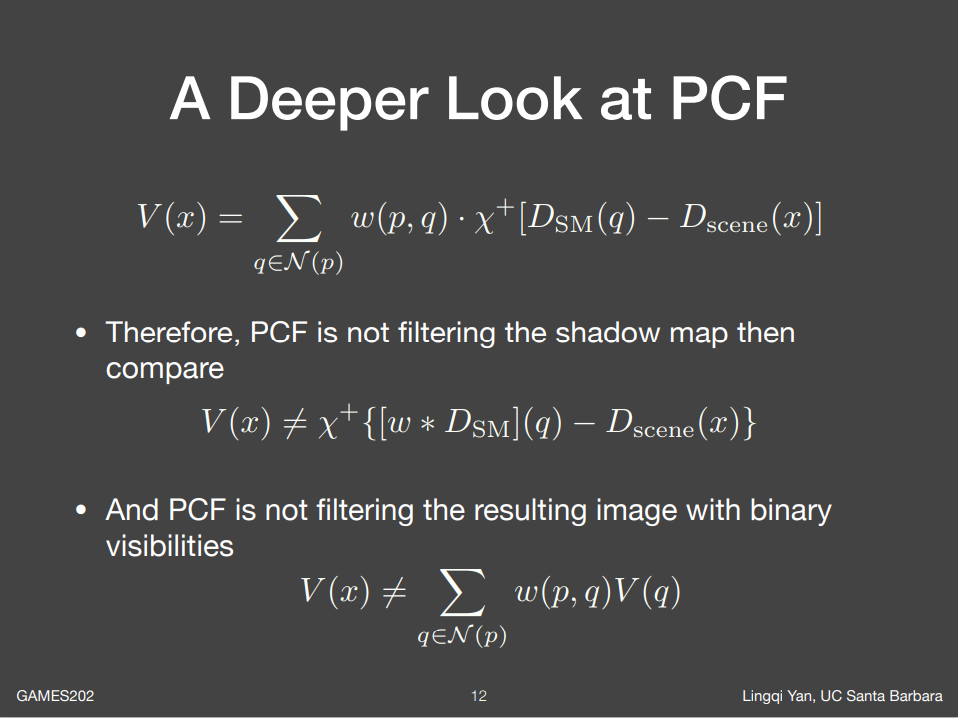
对于PCF的软阴影PCSS,不要理解为对shadow map本身进行加权平均再比较,这样得到的结果仍旧是非零即一,软阴影要做的就是避开非零即一的情况。
且PCF不是对于图像空间内的x点的visibility进行加权平均。(PPT写错了,应该是包含x的范围N内的任意点y)
对PCF的各种优化
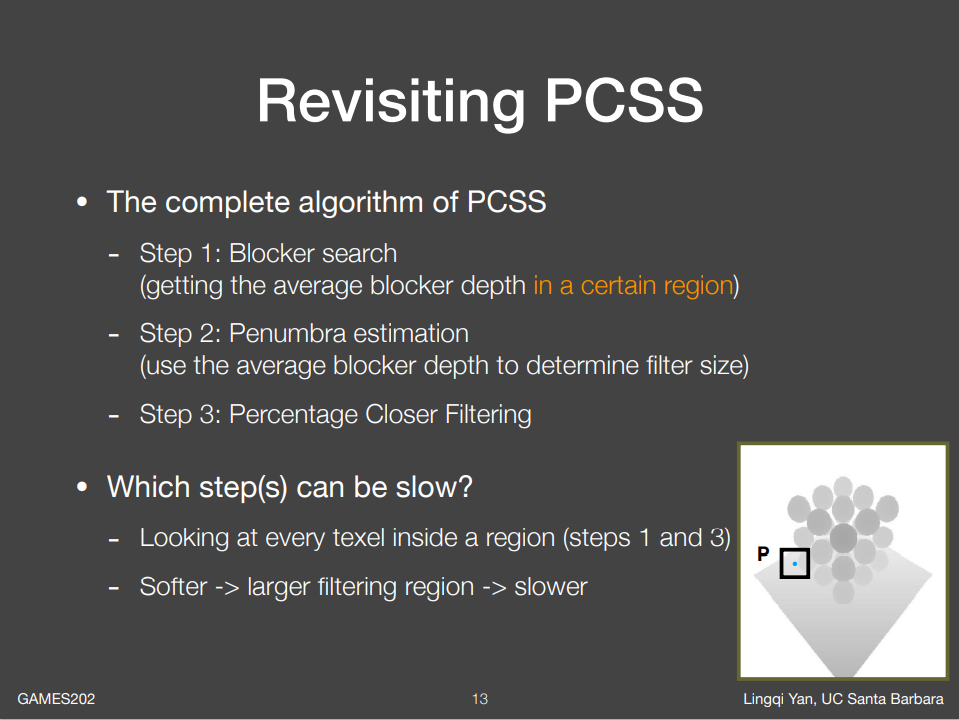
由于PCSS在第一步和第三步都要对一整片区域进行filter,因此效率很低。工业界目前采用取部分采样点的方法,但会产生噪声。
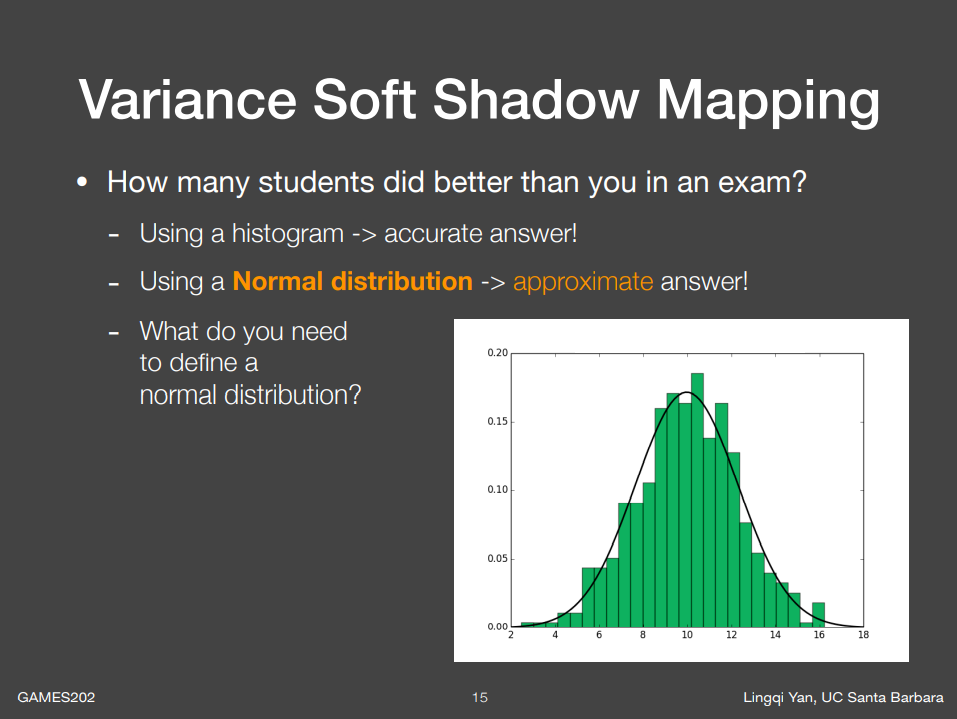
可以采用正态分布的方法近似求得filter结果:均值决定尖在哪,方差决定了胖瘦。
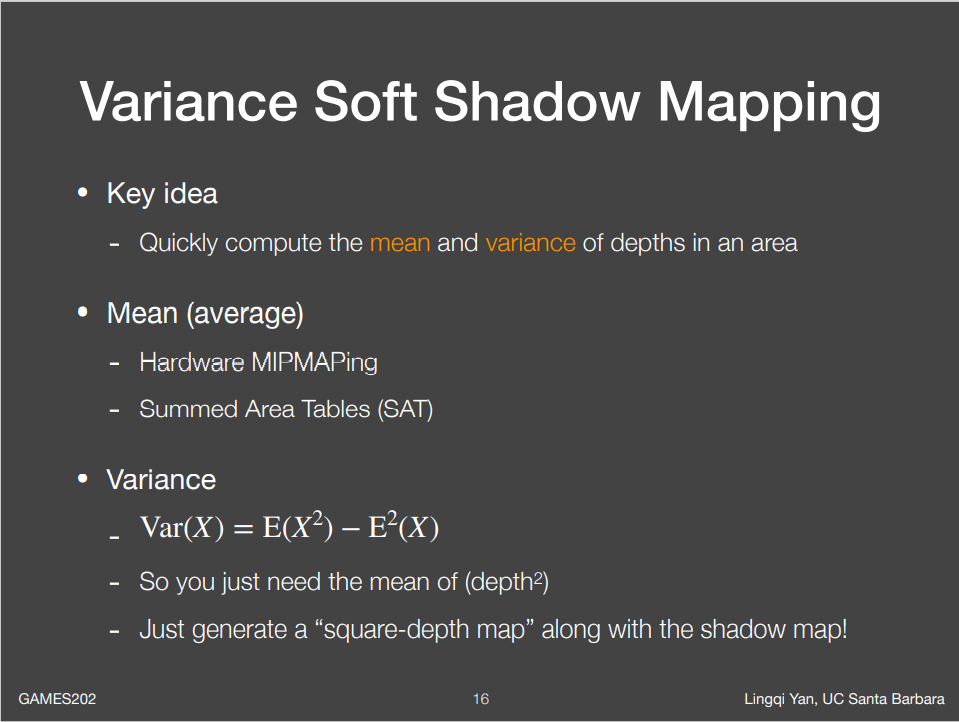
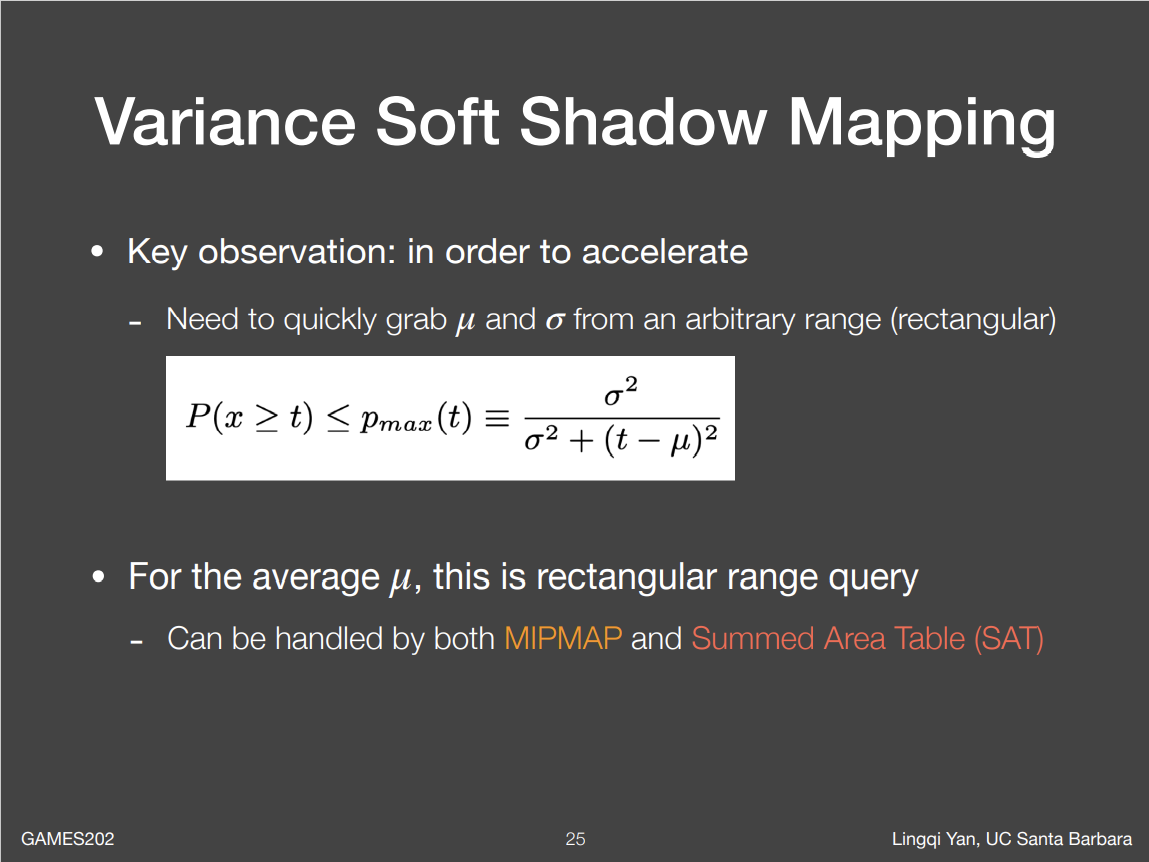
应用正态分布,PCF问题可以简化为在Shadow Map上指定任意一块区域,求深度平均值和方差。
求平均值可以采用mipmap或者SAT方法(见后文)。求方差可以直接用均值与方差的公式求出。为了求平方的均值,另起一张图记录每个深度的平方。在生成shadow map的同时生成square-depth map。
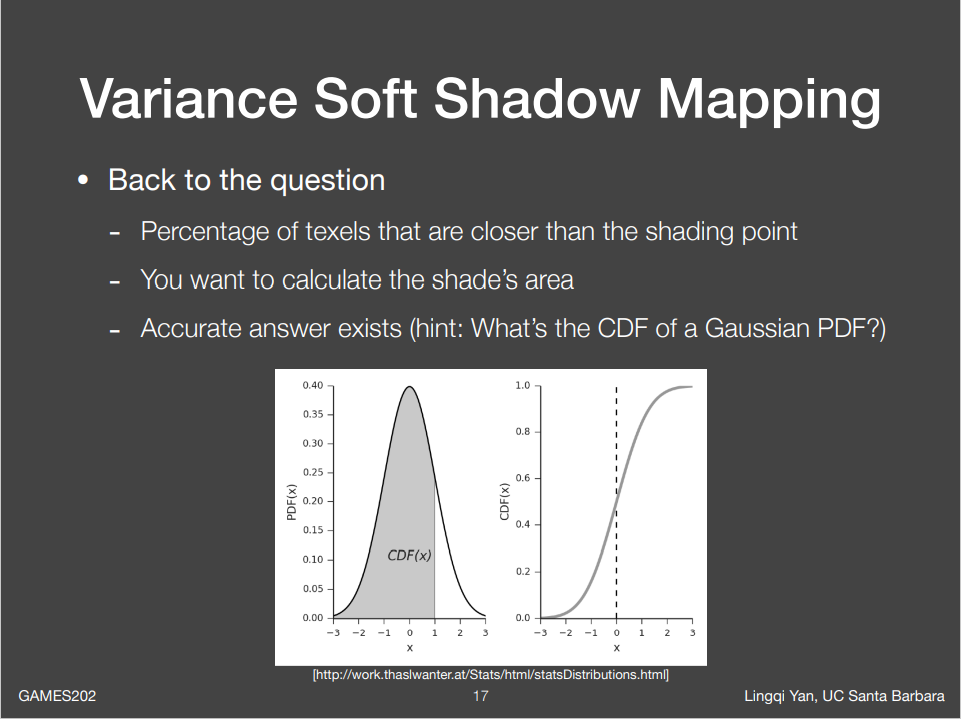
对于想要求得的shading point x,可以通过均值和方差画出正态分布图,统计CDF(x),即计算点x之前的面积。工业界直接打表,计算error function(误差函数)。
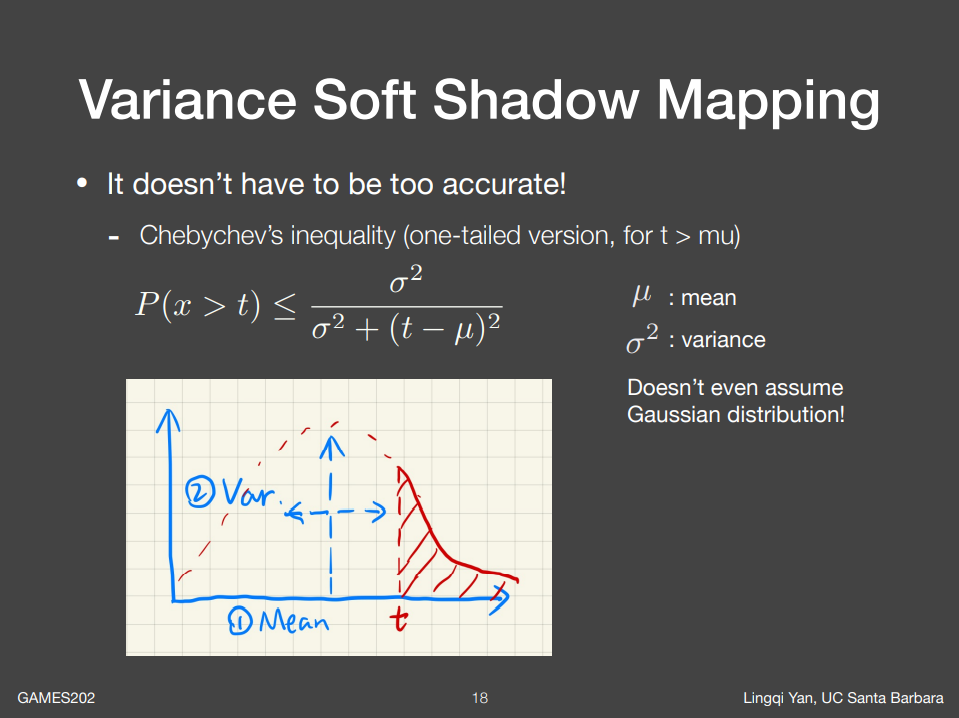
可以用切比雪夫不等式近似拟合函数,输入该点的均值和方差,得到的结果为大于点t的函数值,其值不会超过一个上界,甚至不要求是正态分布,对于任意分布都可以这样解。切比雪夫不等式要求t在均值的右边,在左边就不准确了。
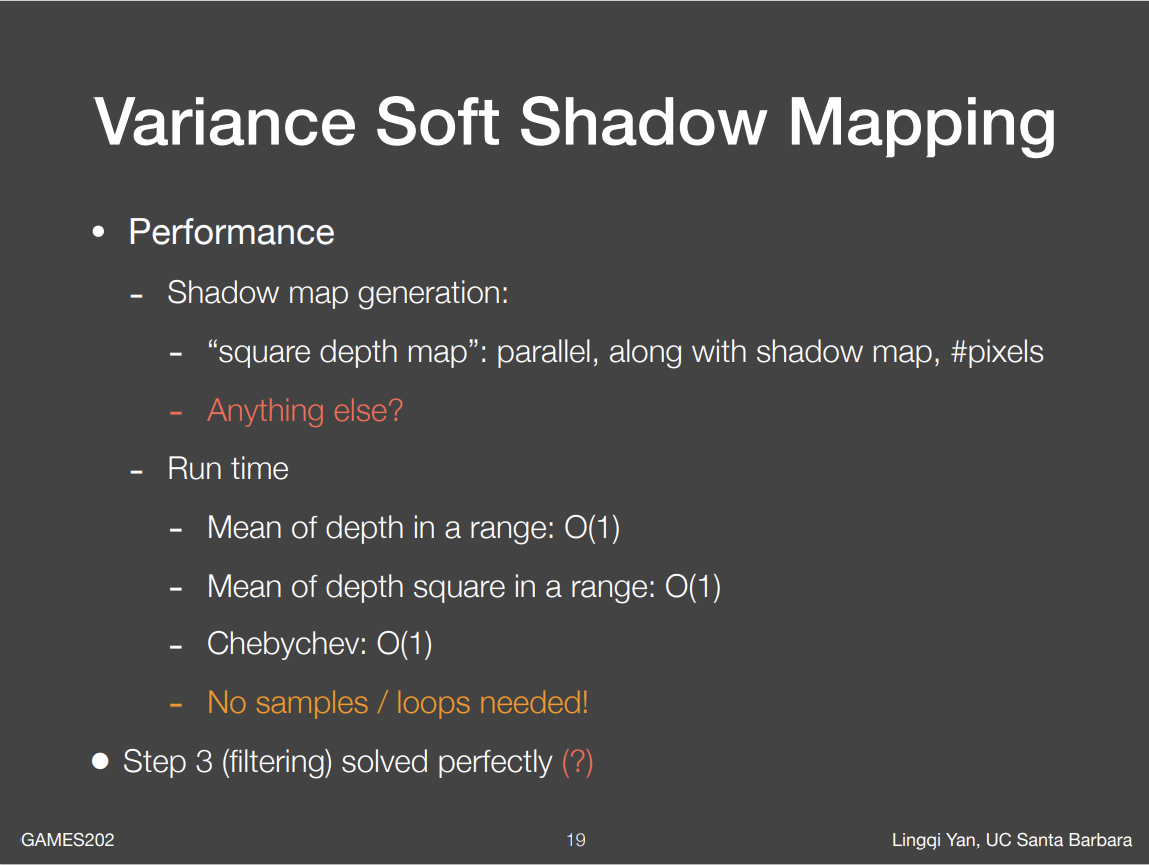
基于以上步骤进行第三步PCF,生成深度图、深度平方图、mipmap、切比雪夫等均需要常数的时间复杂度,因此非常快。但是需要不断更新各种图,也会带来一定的开销。
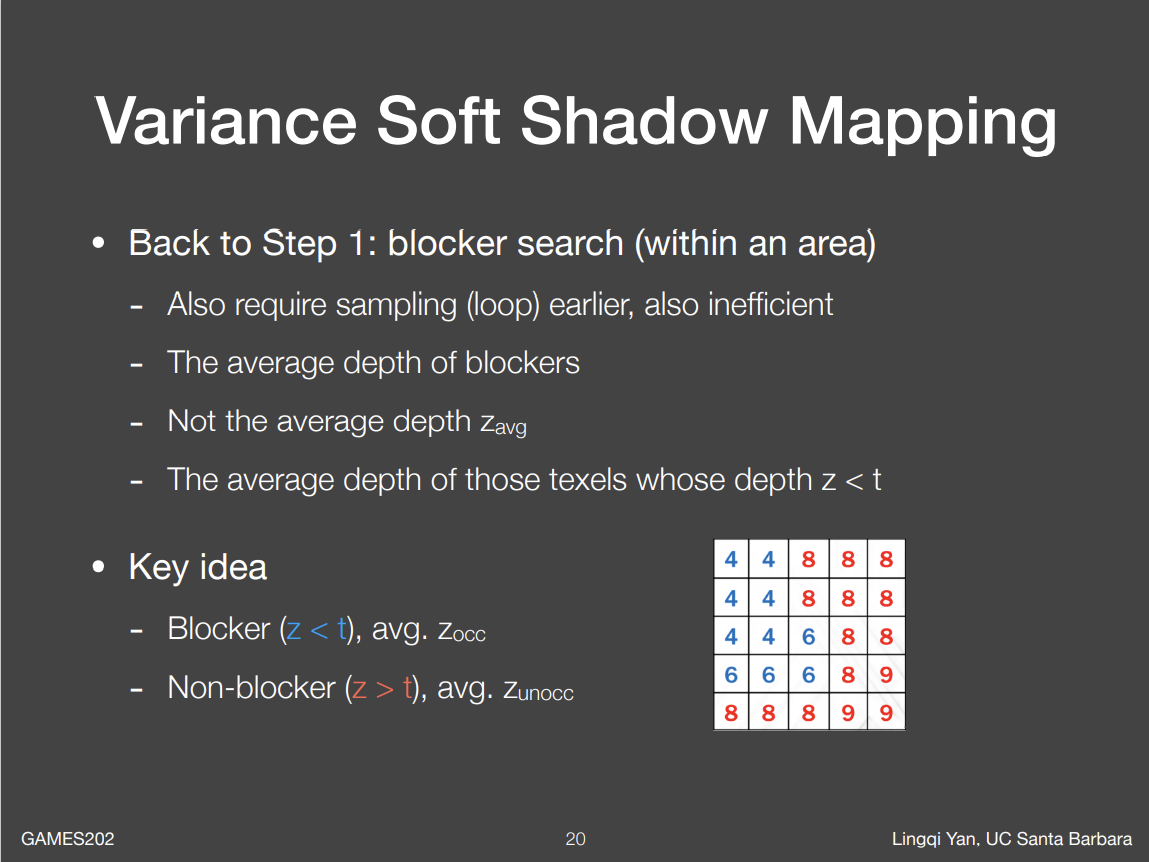
解决了第三步的PCF效率问题,我们回头来看第一步。第一步主要是为了找出在一定范围内的遮挡物深度,后面再做平均等操作。如图,假设shading point深度为7,则蓝色区域为遮挡物,红色区域为未遮挡。
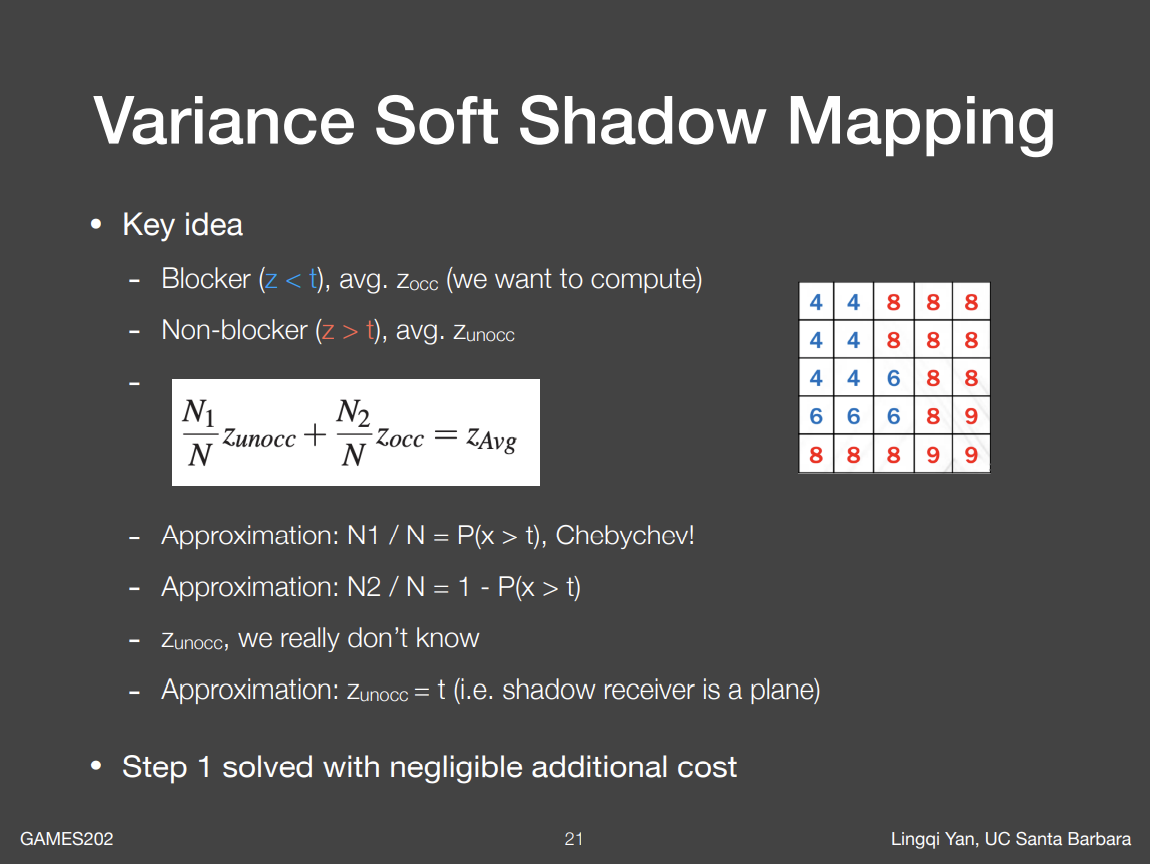
对于第一步的求平均深度,可以采用以下简化的方式快速得出:计算非遮挡物像素所占比例与非遮挡物平均深度,加上遮挡物像素所占比例与遮挡物平均深度乘积,得到的值就是整体的平均深度。两个像素所占的比例可以通过切比雪夫不等式近似快速得出,遮挡物平均深度已知,非遮挡物的平均深度直接近似为t!这个假设在shadow面为平面时十分适用。
给你一张图,和图上的任何一个矩形区域,如何快速求出平均值?
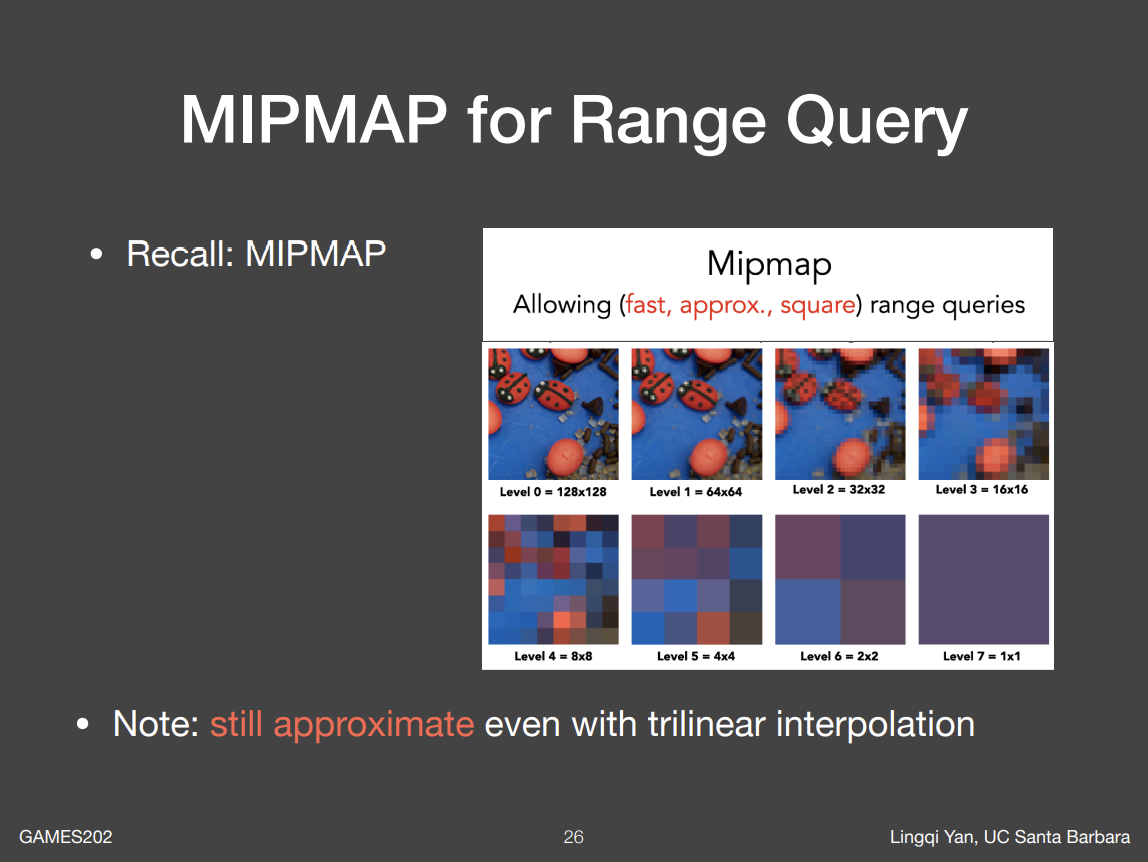
最简单的一定是mipmap,做快速、近似、方形的差值操作。层与层之间可以进行三线性差值求出中间层。
SAT
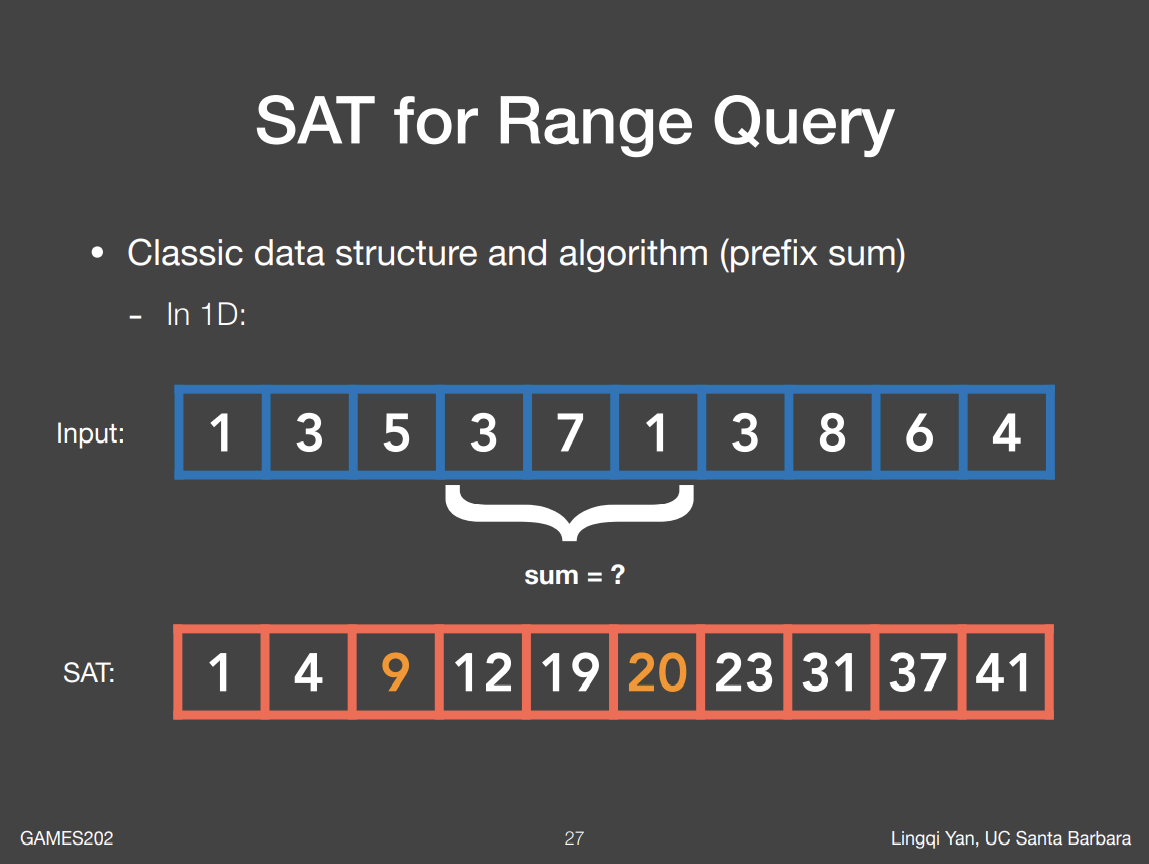
SAT(Sumed Area Table)采用前缀和的方式求平均,将范围内求平均转化为范围内求和的问题。SAT采用预处理的方式先求一遍前缀和,SAT上任何一个元素都代表原始数组从头加到当前位置的总和。可以采用相减的方式求中间任意一段和。
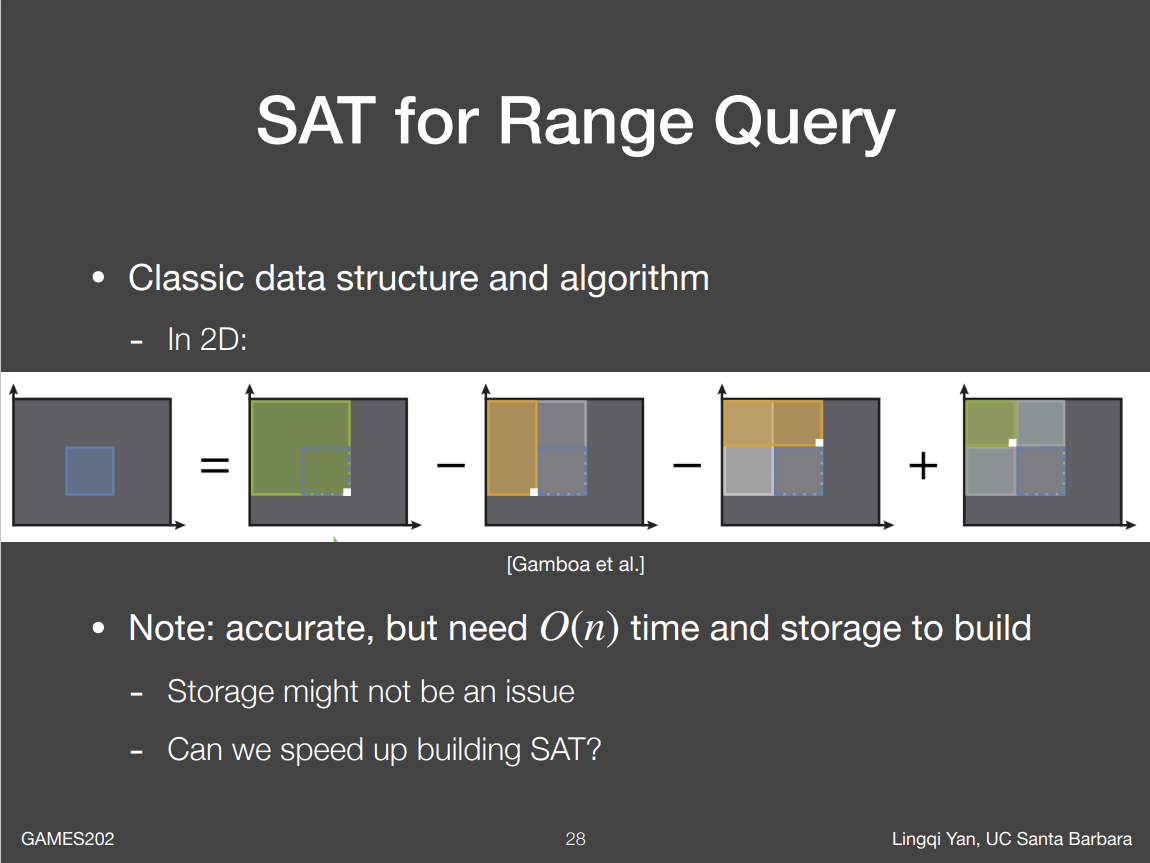
对于二维情况,我们可以使用区域相加减的方式得出任意一个矩形区域的和。通过观察可以得出,相加减的项都是从左上角出发的。因此我们需要一张表,表中记录了从左上角到当前顶点的深度和。基于此,在计算中只需要查四次表就行了。实际上我们只需要先每一行中每一项进行相加计算前缀和,在此基础上每一列再分别计算前缀和,得到的即为一张SAT表。
VSSM的改良
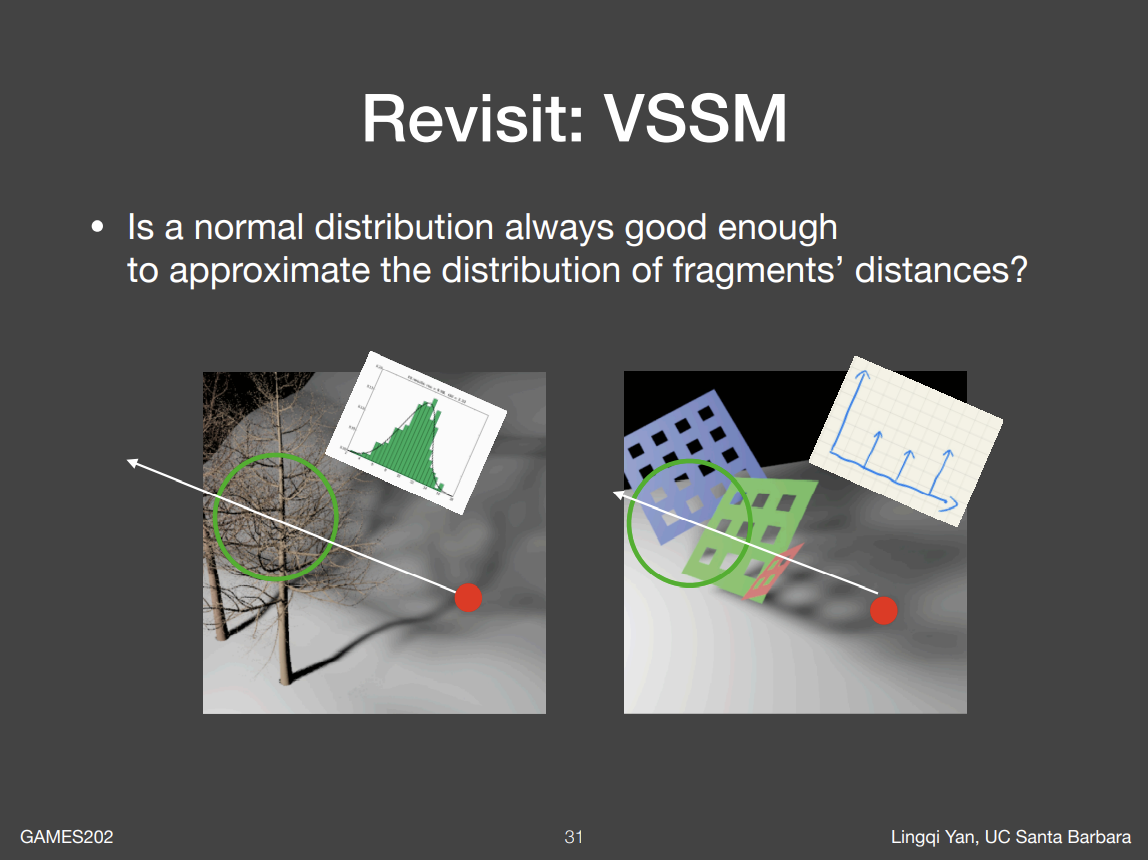
VSSM基于了太多假设,正态分布对于有些情况并不适用。如图光线穿过孔洞,得到三个峰值,不可能用一个正态分布峰值去拟合。
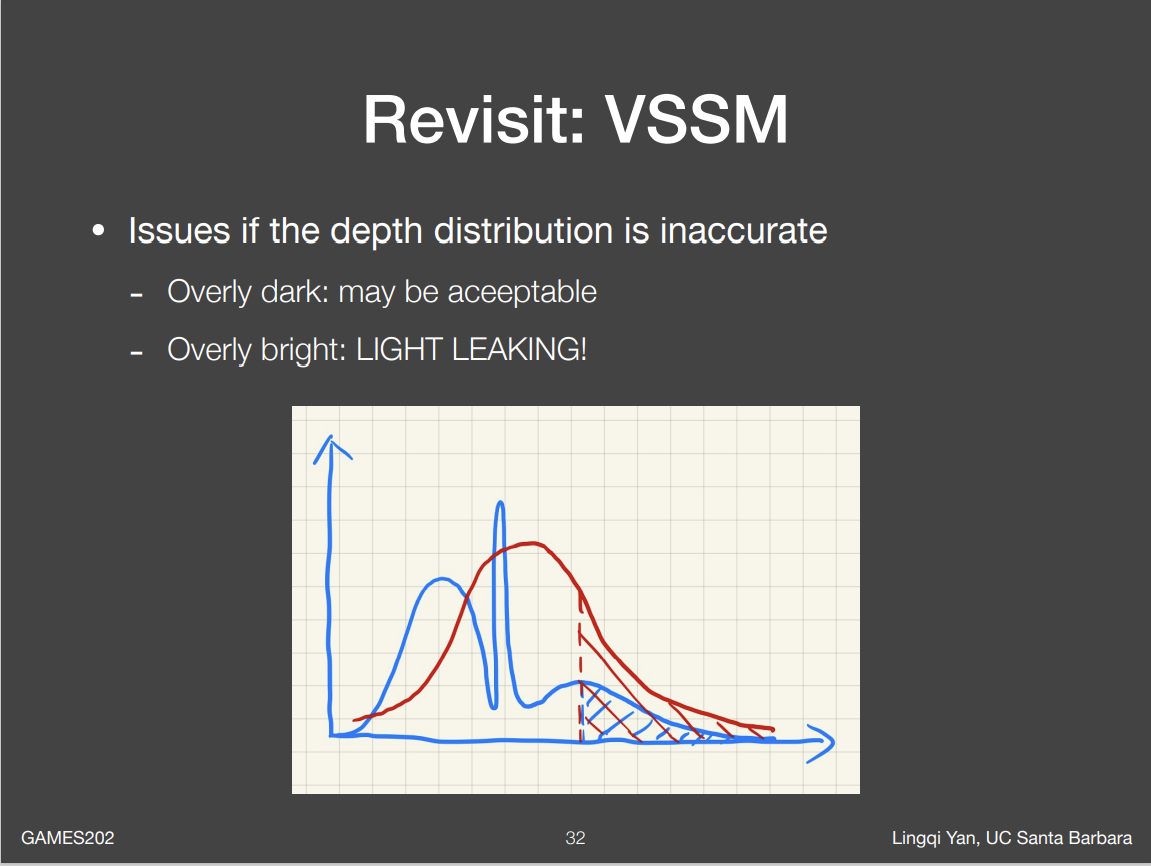
蓝色为实际遮挡物的深度分布,红色为正态分布拟合。可以看出我们假设有红色阴影区域的部分深度大,挡不住,但实际上只有蓝色阴影区域的很少一部分挡不住。对于镂空等形状这种误差尤为严重。
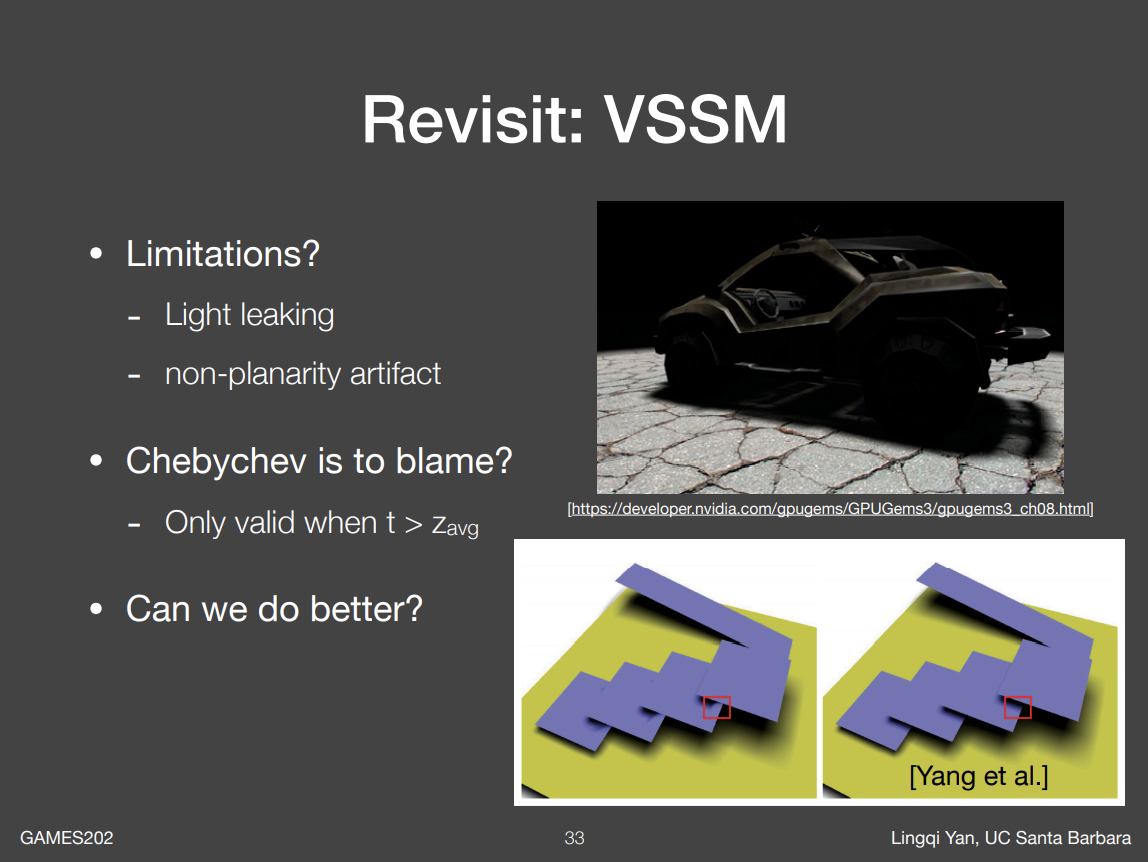
车底很明显有很浅的阴影区域。
对于以上问题,采用使用更高阶的矩来解决。
最简单的矩,我们记录某一个数的各种次方,保留前多少阶的矩。对于VSSM,我们只用了前两阶的矩。
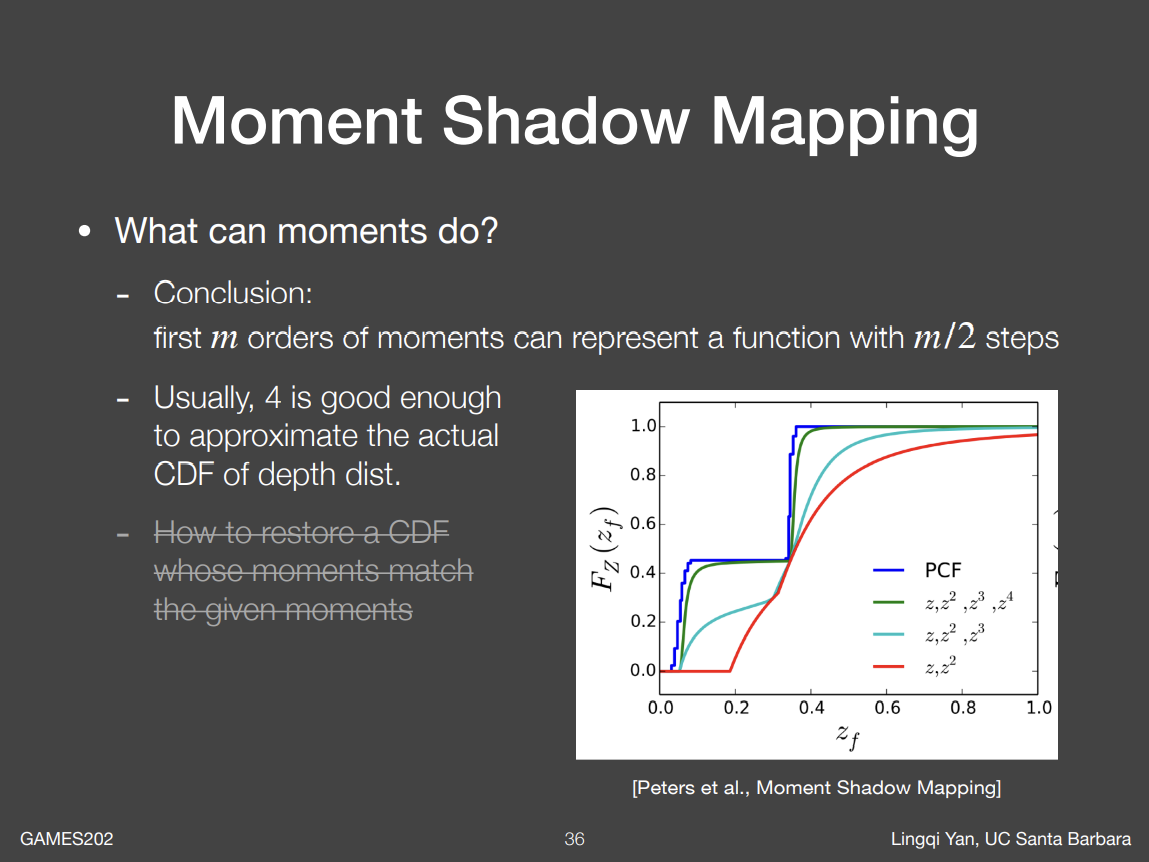
保留前m个矩,可以使用阶跃函数保存m/2个阶。正常情况下使用四阶矩就足够了。
Moment Shadow Mapping做的工作就是在原VSSM的基础上做更高阶的矩
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!